赛感科技(深圳)有限公司
首页
核心技术
产品中心
柔性触觉传感器
单点传感器
阵列传感器
大面积信号采集模组
商用采集模组
数据分析软件
DataTerminalPro
触觉AI大模型
触觉AI大模型
离电型电子皮肤
赛感科技离电电子皮肤
解决方案
人形机器人触觉
自适应抓取触觉
AI玩具触觉
消费电子触觉
汽车电子触觉
医疗健康触觉
高校科研触觉
资讯中心
关于我们
我们是谁
工作机会
联系方式
CN
简体中文
English
预约咨询
自适应抓取触觉
首页
>
解决方案
>
自适应抓取触觉
方案概述
自适应抓取触觉解决方案,以 “柔性多模态触觉感知 + AI 自适应算法” 为核心,为灵巧手、工业夹爪提供一体化抓取解决方案。通过柔性传感器阵列采集压力分布、接触面积等数据,结合自研 AI模型,自动识别物体材质并输出最优抓取参数,无需人工编程即可完成不同形状、材质物体的稳定抓取。
核心优势
材质精准识别,降低抓取损耗
多形态兼容适配,减少设备投入
实时动态调整,提升抓取效率
材质精准识别,降低抓取损耗
凭借 低检测限与高灵敏特性,可快速捕捉塑料、金属、织物等不同材质的接触信号,解决无触觉方案 “材质识别靠人工、易损品抓取不良率高” 的问题。
多形态兼容适配,减少设备投入
传感器采用柔性设计,可贴合弧形、平面等不同机械爪表面,无需为不同场景单独更换抓取机构,降低设备采购与维护成本。
实时动态调整,提升抓取效率
信号响应速度快,抓取过程中可根据物体姿态、受力情况动态调整力度,避免物体滑落或损坏,提高抓取成功率。
方案价值
01
优化生产流程,提升作业效率
无需工程师针对不同物体编写抓取程序,减少人工调试时间;
02
降低运营成本,增强场景适配
柔性适配特性减少机械爪改造成本,AI 自动匹配参数降低人工依赖,同时宽量程设计可覆盖微型电子元件至汽车零部件的抓取需求,一台设备满足多类产品生产。
03
推动产业升级,助力柔性制造
打破传统 “固定轨迹 + 固定力度” 的抓取模式,实现 “自适应、智能化” 抓取,适配多品种、小批量的柔性生产需求,帮助企业从传统制造向智能制造转型。
应用场景
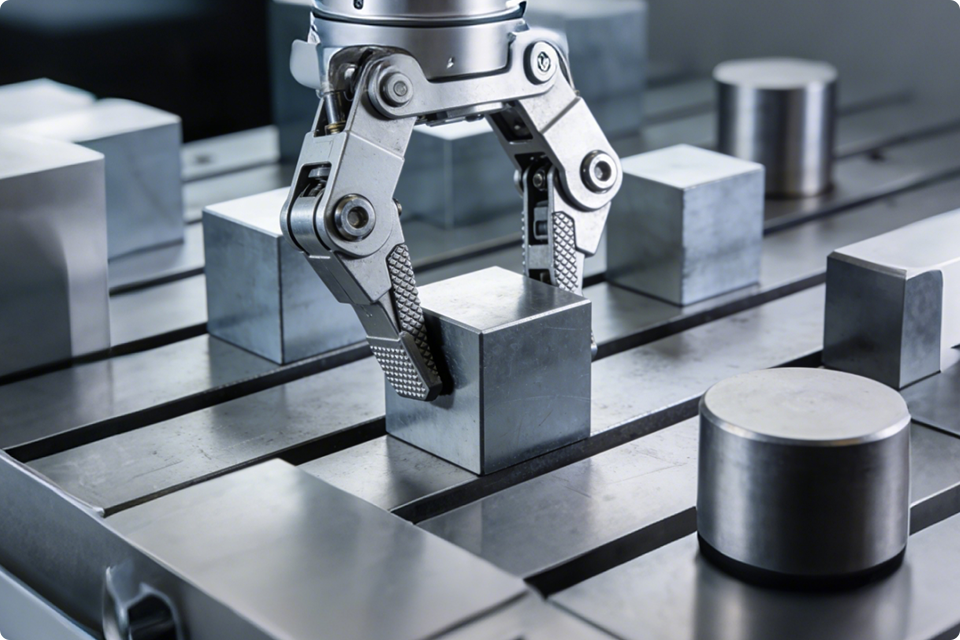
工业夹爪
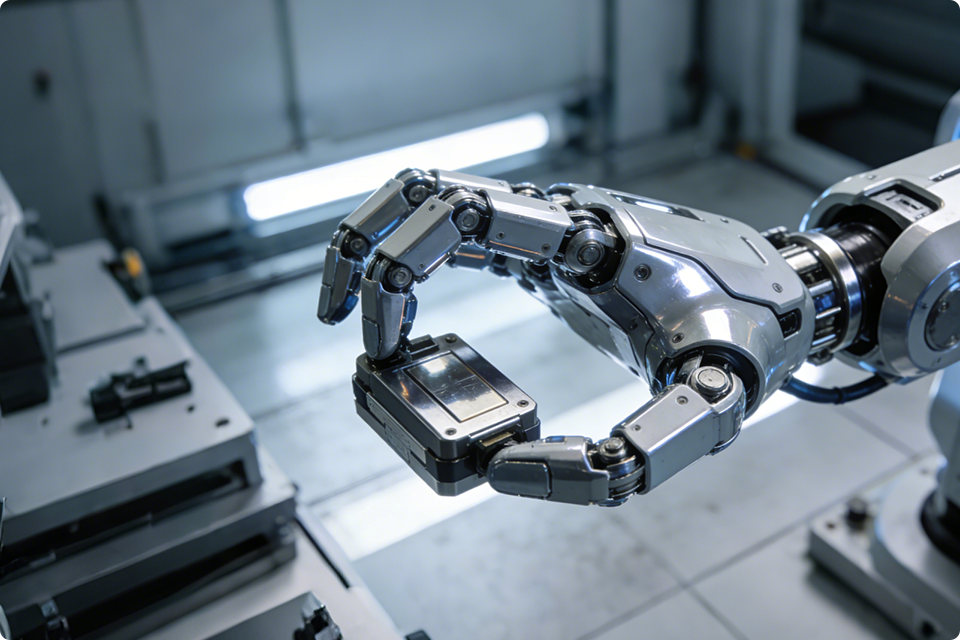
机器人灵巧手
配套产品